200分求数学题Trigonometric functions are used extensively in the design of industrial robots.Suppose that a robot's shoulder joint is motorized so that the angle θ increases at a constant rate of 派/12 radian per second from an initial angle o
来源:学生作业帮助网 编辑:作业帮 时间:2024/11/17 03:47:54
200分求数学题Trigonometric functions are used extensively in the design of industrial robots.Suppose that a robot's shoulder joint is motorized so that the angle θ increases at a constant rate of 派/12 radian per second from an initial angle o
200分求数学题
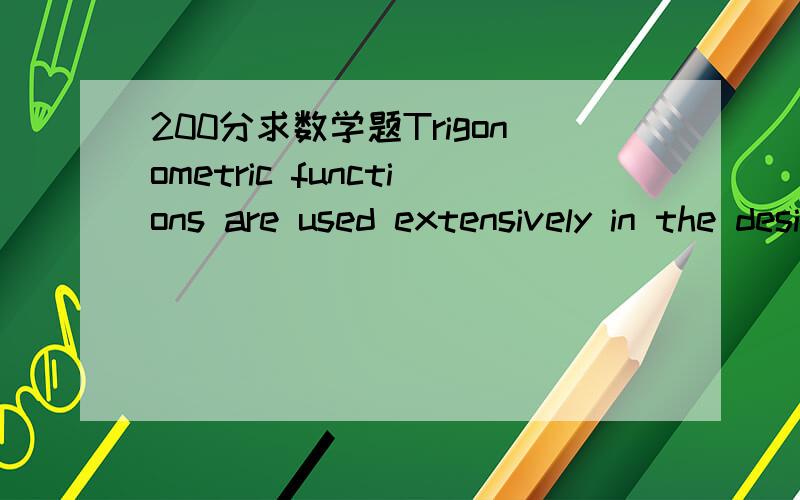
Trigonometric functions are used extensively in the design of industrial robots.Suppose that a robot's shoulder joint is motorized so that the angle θ increases at a constant rate of 派/12 radian per second from an initial angle of θ = 0.Assume that the elbow joint is always kept straight and that the arm has a constant length d = 163 centimeters,as shown in the figure.
第一问问已经截图了
第二问是,Find the total distance that the hand moves.(Round your answer to two decimal places.)
200分求数学题Trigonometric functions are used extensively in the design of industrial robots.Suppose that a robot's shoulder joint is motorized so that the angle θ increases at a constant rate of 派/12 radian per second from an initial angle o
第一问 每一行从左到右
0 30.00
π/12 72.19
π/6 111.50
π/4 145.26
π/3 171.26
5π/12 187.45
π/2 193.00
第二问是求一段弧长
the hand 转过了π/2 rad,弧长为163π/2≈256.04cm.
(图中的h应该是L)
(x -16)(x -4)=0 (x+4)(x-4)(x+2)(x-2)=0 所以x=-4,x=4,x=-2,x=2 y=f(x)=2x/(x+3) xy+3y=2x 2x-xy=3y x=3y/(2-y
3256 1115
额, 好吧
Seen from the figure, height h is a constant, does the “h” marked in the figure is actually "L" while ‘h' lists in the table refers to the height that the hand reaches?