直升机是怎么样在空中改变方向的?直升机如何在空中改变方向 又怎么下降的呢?
来源:学生作业帮助网 编辑:作业帮 时间:2024/11/16 15:54:40
直升机是怎么样在空中改变方向的?直升机如何在空中改变方向 又怎么下降的呢?
直升机是怎么样在空中改变方向的?
直升机如何在空中改变方向 又怎么下降的呢?
直升机是怎么样在空中改变方向的?直升机如何在空中改变方向 又怎么下降的呢?
直升机常用术语
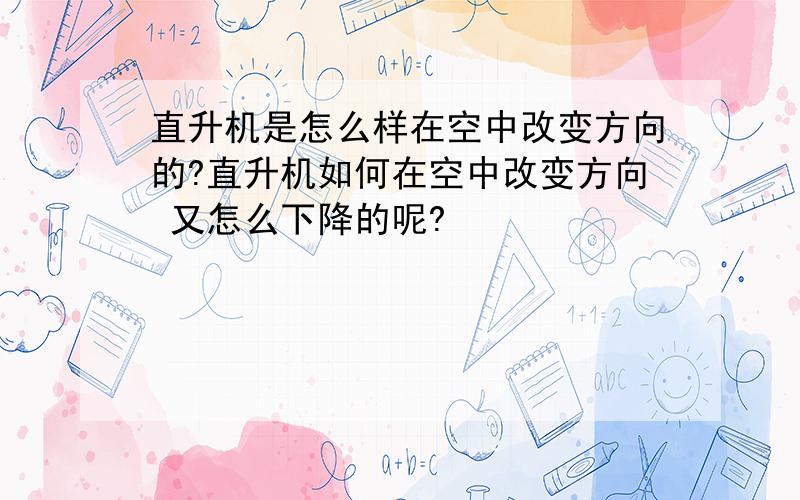
陀螺效应 这是一个很奇妙的物理现象,如下图,一个转动的物体,当在某一点施力,施力的效果会出现在沿转动方向 90 度的地方出现,而且转动的物体会有保持原来状态,抗拒外来力量的倾向,也就是转动中物体的轴心会极力保持在原来所指的方向.像枪管中的膛线使子弹高速旋转以保持直进性就是运用陀螺效应,直升机高速旋转的主旋翼同样的也会有陀螺效应产生,控制方式也必须考虑这种力效应延后 90 度出现的陀螺效应.
陀螺仪的功用
直升机飞行的基本原理是利用主旋翼可变角度产生反向推力而上升,但对机身会产生扭力作用,于是需要加设一个尾旋翼来抵消扭力,平衡机身,但怎样使尾旋翼利用合适的角度,来平衡机身呢?这就用到陀螺仪了,它可以根据机身的摆动多少,自动作出补偿讯号给伺服器,去改变尾旋翼角度,产生推力平衡机身.以前,模型直升机是没有陀螺仪的,油门、主旋翼角度和尾旋翼角度很难配合,起动后便尽快往上空飞(因为飞行时较易控制),如要悬停就要控制杆快速灵敏的动作,所以很容易撞毁,现在已有多中直升机模型使用的陀螺仪,分别有机械式、电子式 、电子自动锁定式.
直升机的抬头现象
当直升机快速前进时,旋翼一偏离 6 点和 12 点钟方向时,两支旋翼对空气速度就会不一样,而在 3 点和 9 点钟方向产生最大速度差,假设旋翼翼端转速 300km/h,机体前进速度 100km/h 时,以 R/C 直升机顺时钟方向转动的旋翼来讲,3 点钟方向对空气速度200km/h ( 后退旋翼 ),9 点钟方向对空气速度 400km/h(前进旋翼 ),产生 3 点和 9 点钟方向的升力差,因陀螺效应的关系,力效应发生在 6 点和 12 点钟方向产生抬头现象,此种抬头现象不论主旋翼是顺时针或逆时针转动皆会发生.
翼端速度与离心力
直升机靠著主旋翼高速回转时所产生的离心力来悬住机体.离心力是水平方向的力而机体重力是垂直方向的力,实№飞行时两者几乎呈 90 度,所以直升机飞行时其主旋翼所产生的速度和离心力是非常大的.
在这里有一个公式可算出翼端速度和离心力:
翼端速度:
V = 2 * 圆周率 * R * 60 * RPM
V = 旋翼翼端速度(公尺/小时)
圆周率 = 3.14(大约值)
R = 旋翼头中心到翼端距离(公尺)
RPM = 旋翼每分钟转速
以30级来算
停悬 1500 RPM 翼端速度= 2 * 3.14 * 0.625 * 60 * 1500 = 353km/h
上空 1800 RPM 翼端速度= 2 * 3.14 * 0.625 * 60 * 1800 = 424km/h
速度够吓人吧 !
离心力:
F = W * R * ( 2 * 圆周率 * RPM / 60 )* ( 2 * 圆周率 * RPM / 60 ) / G
F = 离心力,也就是单边旋翼头承受的拉力 (公斤)
W = 旋翼重量 (公斤)
R = 旋翼头中心到旋翼重心距离 (公尺)
G = 重力加速度 ( 9.8 公尺/ 秒 平方)
以30及来算
停悬1500 RPM 离心力=0.1 * 0.355 *(2*3.14*1500/60)的平方/9.8 = 89 公斤
上空1800 RPM 离心力=0.1 * 0.355 *(2*3.14*1800/60)的平方/9.8 =129公斤
可见旋翼头要承受多大的拉力
以上只是30级的数据,60级的数据更大
地面效应
当直升机接近地面时会产生地面效应,直升机离地滞空时,旋翼把空气向下抽,因此旋翼和地面之间的空气密度变大,形成气垫效果,浮力会变佳,离地越近,效果越佳,但是因为空气被压缩,无处逸散而产生乱流,导致停悬的不稳定,所以R/C直升机在接近地面时会呈现不稳定现象而比较难控制,产生这种气垫效果的高度大约是旋翼面直径的一半左右.
反扭力
高速转动的主旋翼,有一定的速度和质量,除了会产生陀螺效应外,更有反扭力的产生,尾旋翼主要的功用就是平衡反扭力使机身不自转,但现在的 R/C 直升机均采用可变攻角形态,油门的加减,攻角的变化 ...等因素使得反扭力千变万化,尾旋翼产生的平衡力也要跟著快速变化,以保持机身的稳定,现在的 R/C 直升机采用各种的措施来平衡瞬息万变的反扭力.直升机的反扭力可分成两种:静转距和动转距.两者的特性不同所采用的平衡方法也不同.
1.静转距
静转距和旋翼攻角,旋翼转数有关,两者的大小都会对静转距造成影响,而且静转距是随著旋翼攻角,旋翼转数的产生而持续存在的.旋翼 +9 度 1800rpm 和 +9 度 1500rpm的静转距不同.而 +9 度 1800rpm 和 +5度 1800rpm的静转距也不同.当操作直升机上升下降时, 旋翼攻角,旋翼转数都不断的在变化, 静转距的大小也不断的在变化.所以必须不断的变化尾旋翼攻角来矫正.静转距以尾旋翼连动 Revolution Mixing(也叫做 ATS )来矫正,在较高级的遥控器上都拥有多段式的 ATS,以因应不同的攻角,油门曲线组合.
2.动转距
顾名思义,动转距是"动了"才会产生的转距.直升机从停悬加油门到最高速的"过程"中,动转距就会产生,动转距的大小决定在加速过程的快慢,停悬加油门到最高速花 2 秒钟比花 4 秒钟所产生的动转距大,一但到达最高速时,动转距就消失了.
以力学来讲,如静转距是因速度而产生,那动转距就是因加速度而产生,克服动转距以 ACC ( Acceleration Mixing ) 或陀螺仪来矫正,ACC是早期陀螺仪不普及时代的产物,是一种主动式的矫正方式,预先在发射机设定连动值,但因影响动转距的因素实在太多,难以预先设定一个适当的矫正值,在陀螺仪普及后就没人使用了.现今有些遥控器仍保留此项功能,使用陀螺仪时必须关闭 ACC,否则陀螺仪和 ACC两种修正系统会相冲突,导致不正常的修正.
陀螺仪虽然是一种被动式的修正方式,但是总比人工修正快多了.而陀螺仪的优劣也是决定在反应速度,一般机械式陀螺仪的反应速度大约 70 ms,压电式陀螺仪大约 10ms,普通伺服机转 60 度 要 200ms ,好一点的伺服机约 100ms ,所以使用压电陀螺仪时, 使用高速伺服机才能发挥压电式陀螺仪的功效.
尾旋翼联动(evolution Mixing )陀螺仪的调整
静转距和动转距虽是不同类型的反扭力,但仍会对 ATS 系统和陀螺仪造成微量的相互混淆.所以调整 ATS ( Revolution Mixing ) 前,必须先把陀螺仪感度尽可能的调低.
调整ATS前,先保持机体停悬,如果尾舵会偏向,把机体降落,调整尾舵拉杆长度或用内部微调 ( SUB TRIM ) 矫正,使停悬时尾舵不会偏向,再来调整 ATS ( Revolution Mixing )尾部连动,因为陀螺仪对静转距亦会有微量的修正作用,所以要先尽可能的调低陀螺感度,此时要注意有些陀螺丁改变感度时,尾舵中立点会稍微改变,此时先用外部微调修正尾舵偏向,停悬后慢慢加油门上升,观察尾部偏向,加减 REVO UP 值矫正之,要慢慢加油门的原因是要把动转距 ( 加速度值 ) 减到最小.以减少动转距对 ATS 系统的影响,减油门下降也是一样的做法,以 REVO DOWN 矫正偏向,直到停悬,加减油门上升下降时,尾舵都不会偏向,然后再加大陀螺仪感度,此时陀螺仪感度尽可能调大,感度只要不会大到引起尾舵左右晃动即可,此时可得到最大的尾舵修正能力.
机头锁定式陀螺仪
传统式陀螺仪对动转距有不错的修正作用,但对静转距就没辄了,其他类似静转距的作用力诸如侧风等持续的作用力,对传统陀螺仪来说并无法产生足够的修正作用.这也是装了传统陀螺仪以后还是要做上下跟轴连动调整、侧风时要带尾舵的原因.
机头锁定式陀螺仪不但对瞬间短暂的动转距有修正作用,对静转距等持续的偏向力也有修正作用,因为它会"记住"现在机头是朝哪个方向,直到你打尾舵改变方向为止.因为它能感应到引起偏向的所有外力,也就是机头一偏向,陀螺仪马上感应到而送出修正讯号,直到机头回到原来的方向为止,所以在侧风停悬、侧面飞行、后退飞行、侧面筋斗等尾部是锁定在一个方向,完全不用操纵者做尾舵的修正动作.
机头锁定式陀螺仪和传统式陀螺仪的主要差异在於对静转距的感应能力,可做以下试验,用手转动机身,无论你把机头转得多慢 ( 即转动时的加速度值小到几乎只剩静转距 ),机头锁定式陀螺仪都有办法感应得到而做出修正动作,而传统式陀螺仪一但机头转动时慢到一定速度 (即 加速度值小於一定数值 ),就感应不出来了.