求3自由度关节机械手逆运动学算法如上图所示,已知杆FA/AD/DC/CE/AB/BC的长度,其中AB与DC,AD与CB组成平行四边形;已知E点坐标,求F点的坐标值(0,Y);B点的坐标值(X,0)关于E点坐标的方程式?
来源:学生作业帮助网 编辑:作业帮 时间:2024/07/21 19:52:43
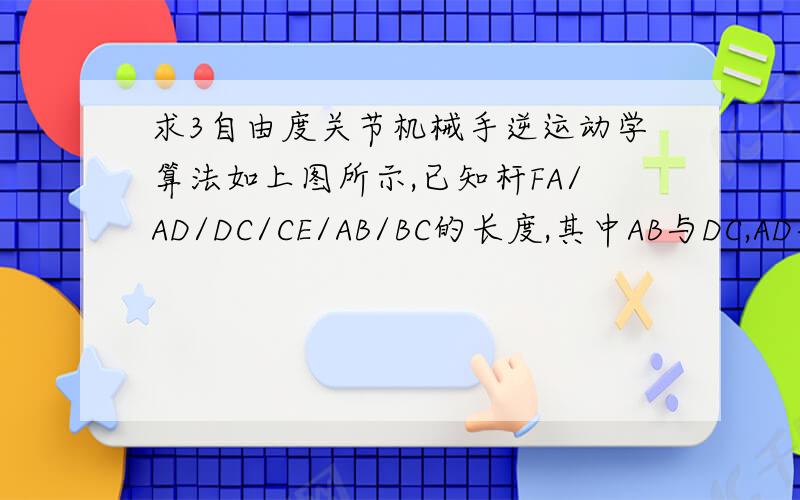
求3自由度关节机械手逆运动学算法如上图所示,已知杆FA/AD/DC/CE/AB/BC的长度,其中AB与DC,AD与CB组成平行四边形;已知E点坐标,求F点的坐标值(0,Y);B点的坐标值(X,0)关于E点坐标的方程式?
求3自由度关节机械手逆运动学算法
如上图所示,已知杆FA/AD/DC/CE/AB/BC的长度,其中AB与DC,AD与CB组成平行四边形;
已知E点坐标,
求F点的坐标值(0,Y);B点的坐标值(X,0)关于E点坐标的方程式?
求3自由度关节机械手逆运动学算法如上图所示,已知杆FA/AD/DC/CE/AB/BC的长度,其中AB与DC,AD与CB组成平行四边形;已知E点坐标,求F点的坐标值(0,Y);B点的坐标值(X,0)关于E点坐标的方程式?
X = FA*AD/DC?65
Y = TR*AD/RE/65
若AB=m,AF=n,作垂线AH垂直于OB交点为H,则AH=msinβ,BH=mcosβ,作FI于AH 垂直交于I点,则AI=ncos(α+β-π/2),FI=nsin(α+β-π/2),所以 Y=AH-AI=msinβ- ncos(α+β-...
全部展开
若AB=m,AF=n,作垂线AH垂直于OB交点为H,则AH=msinβ,BH=mcosβ,作FI于AH 垂直交于I点,则AI=ncos(α+β-π/2),FI=nsin(α+β-π/2),所以 Y=AH-AI=msinβ- ncos(α+β-π/2) X=FI+BH=mcosβ+nsin(α+β-π/2
收起
而真本事是学不到的。中国人都在国外钢琴企业见到人家的击弦机构、键盘是在要求机械手有六个自由度:躯干的旋转(基座)、大臂的转动(肩关节)、小